



개요
석사 과정 3학기 [2024.06 ~ 2024.12] 동안 코벤트리 대학교의 방문 연구원으로 연구 과제 협업
역할
커스텀 드론을 위한 CAD 도면 작성, 3D 프린팅
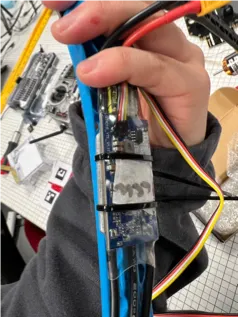
회로 배선
가제보 클래식 HITL 환경 구성
세부 사항
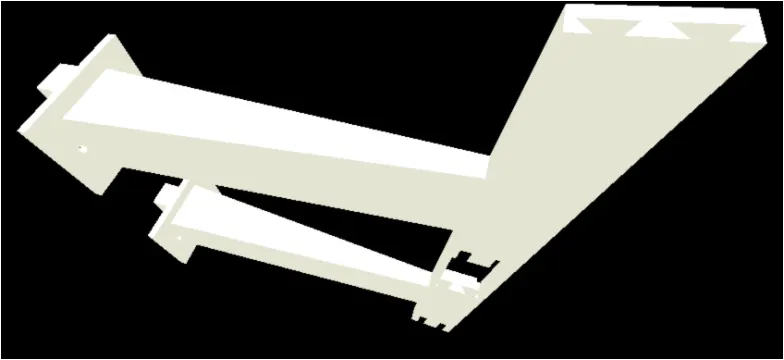
CAD 디자인
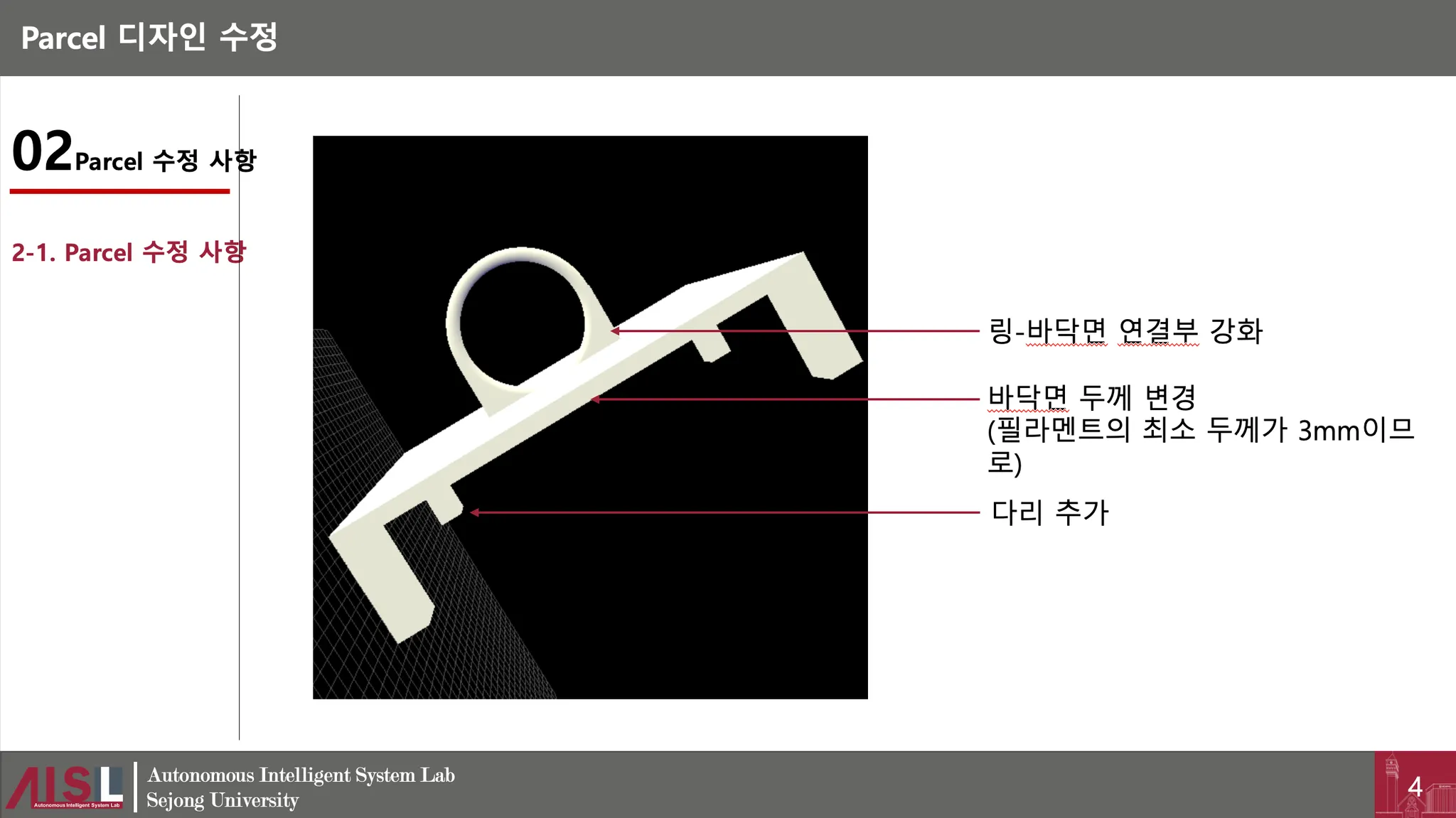
소포의 디자인 도안 (추후에 다리를 제거함)
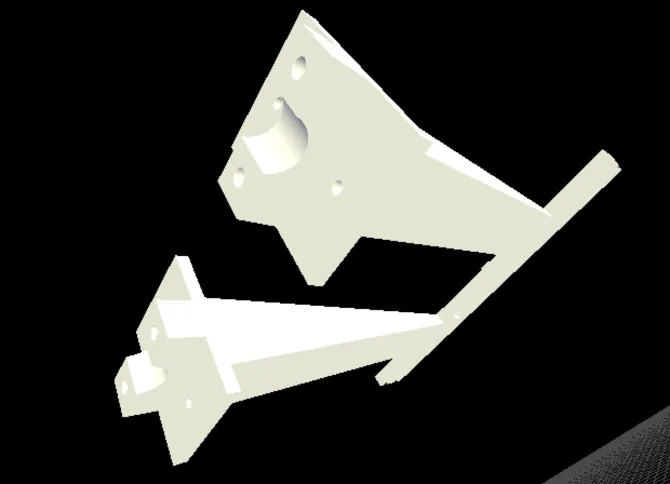
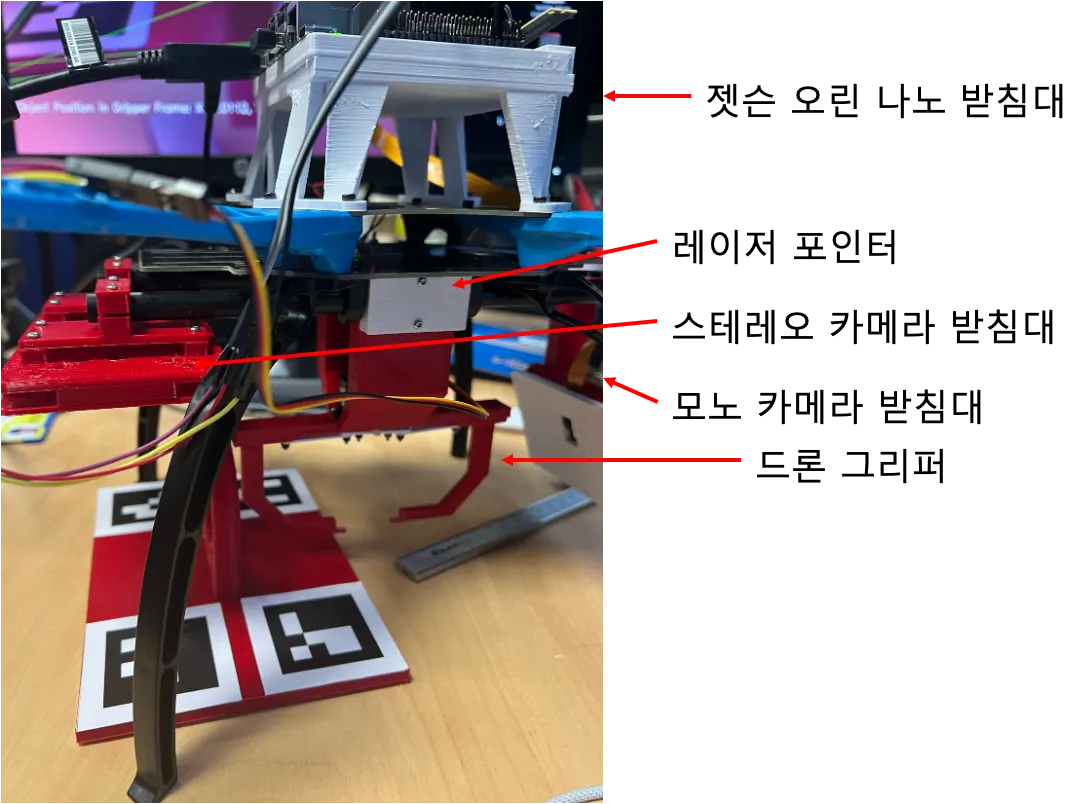
드론 하단에 부착되는 그리퍼 CAD 도안 중 일부
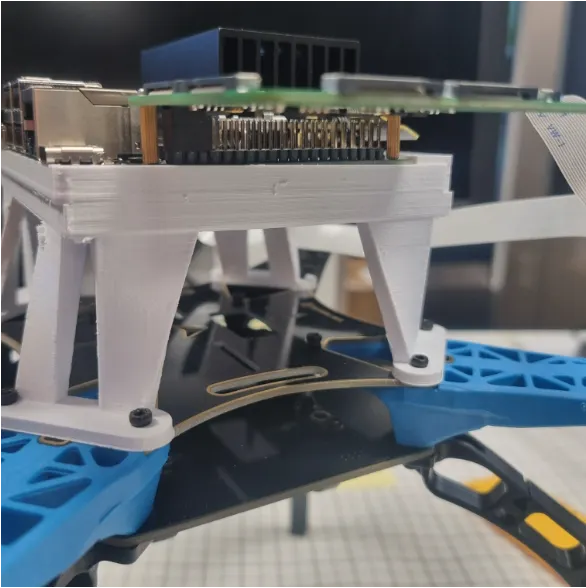
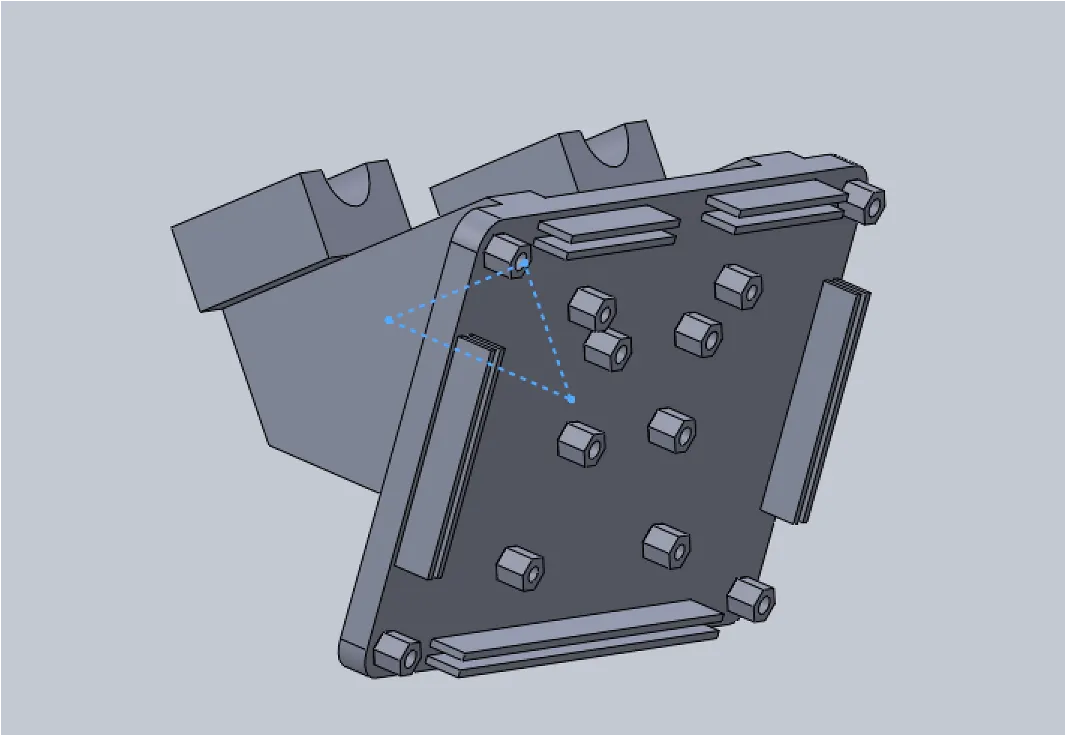
Companion Board(Jetson Orin Nano)를 부착하기 위한 서포터 3D 프린팅 출력물
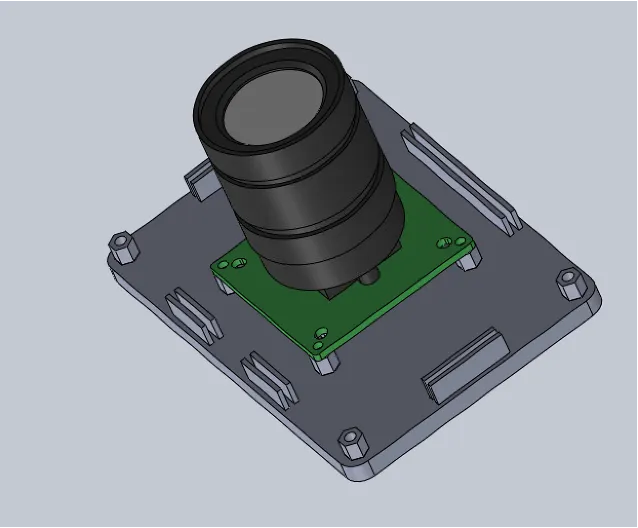
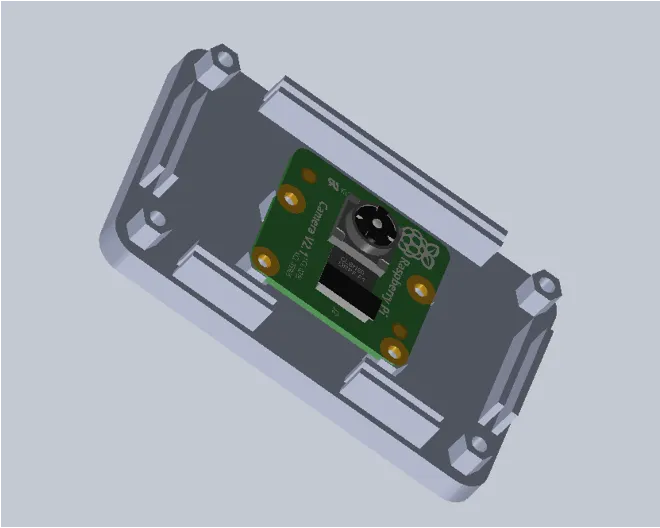
드론에 부착되는 하방 카메라를 위한 3D CAD 도면
HITL 테스트 환경 셋업
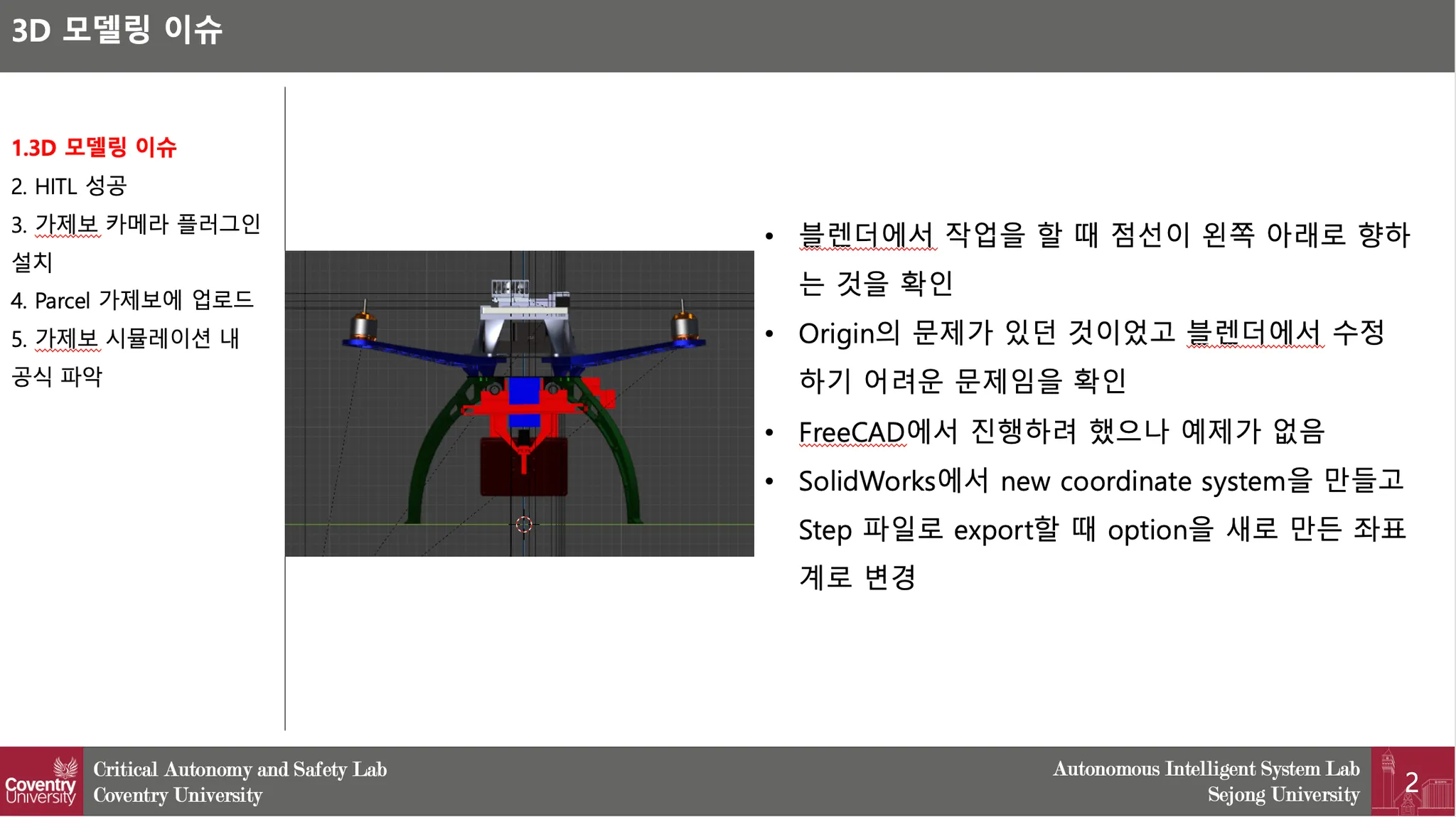
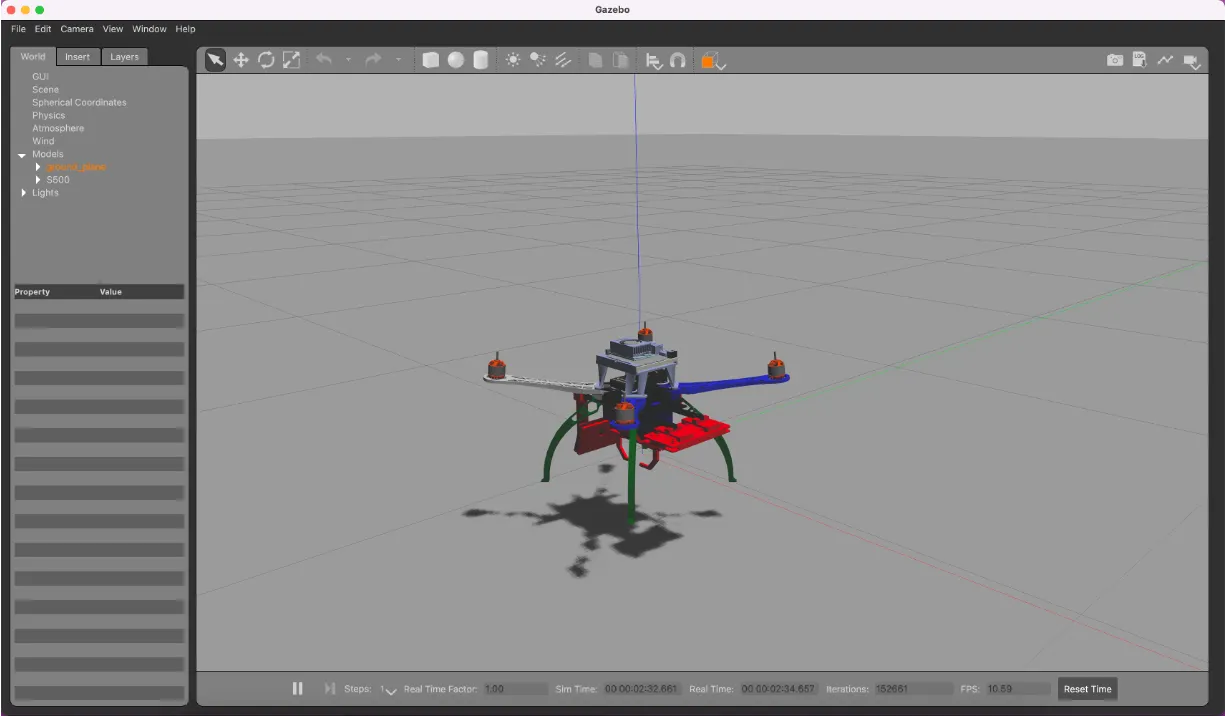
드론 셋업: SolidWorks → Blender(texture 설정 관련 이슈) → Gazebo (dae) 형식 변환
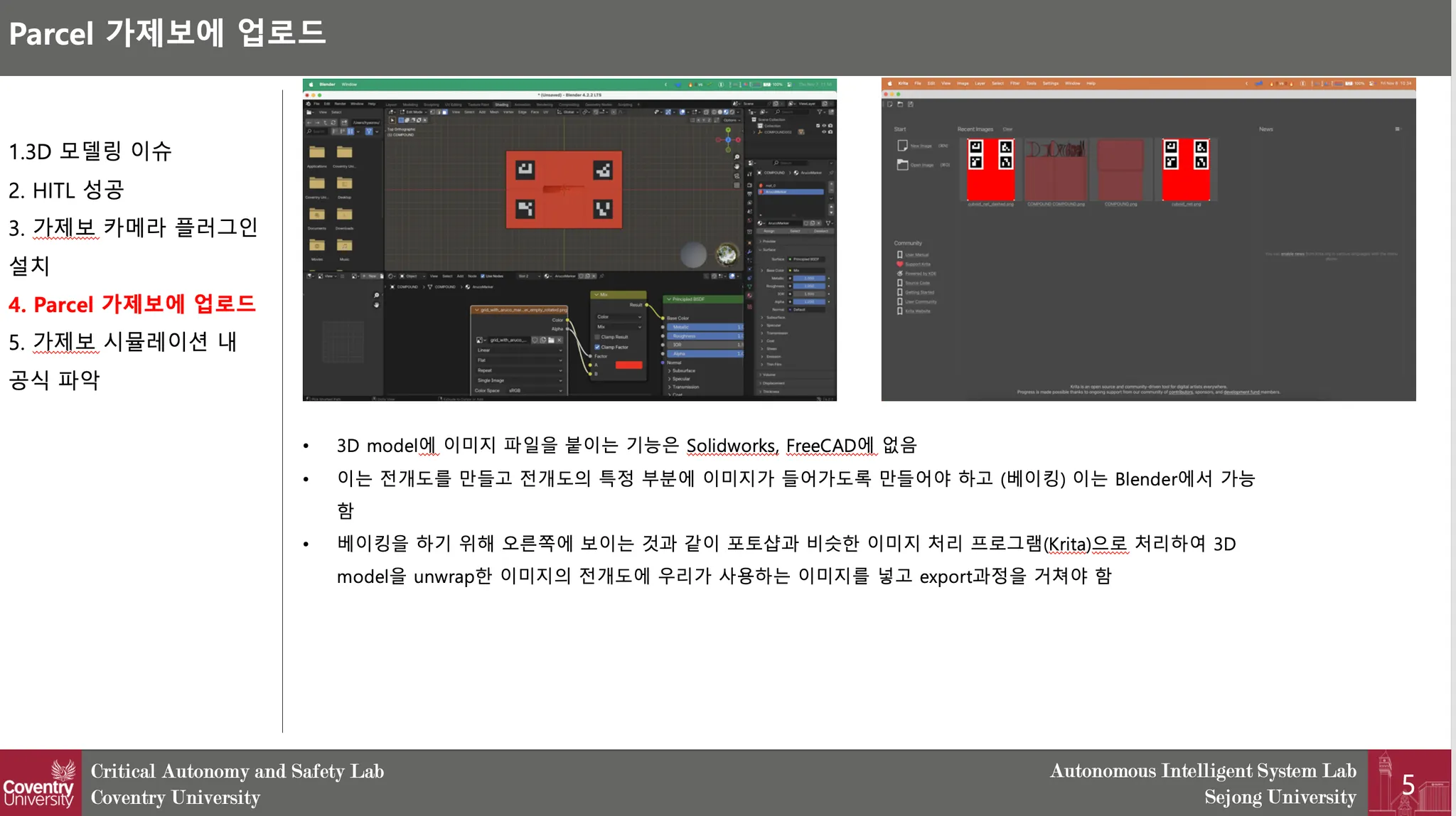
소포 셋업 과정: Blender에서 베이킹 과정 추가
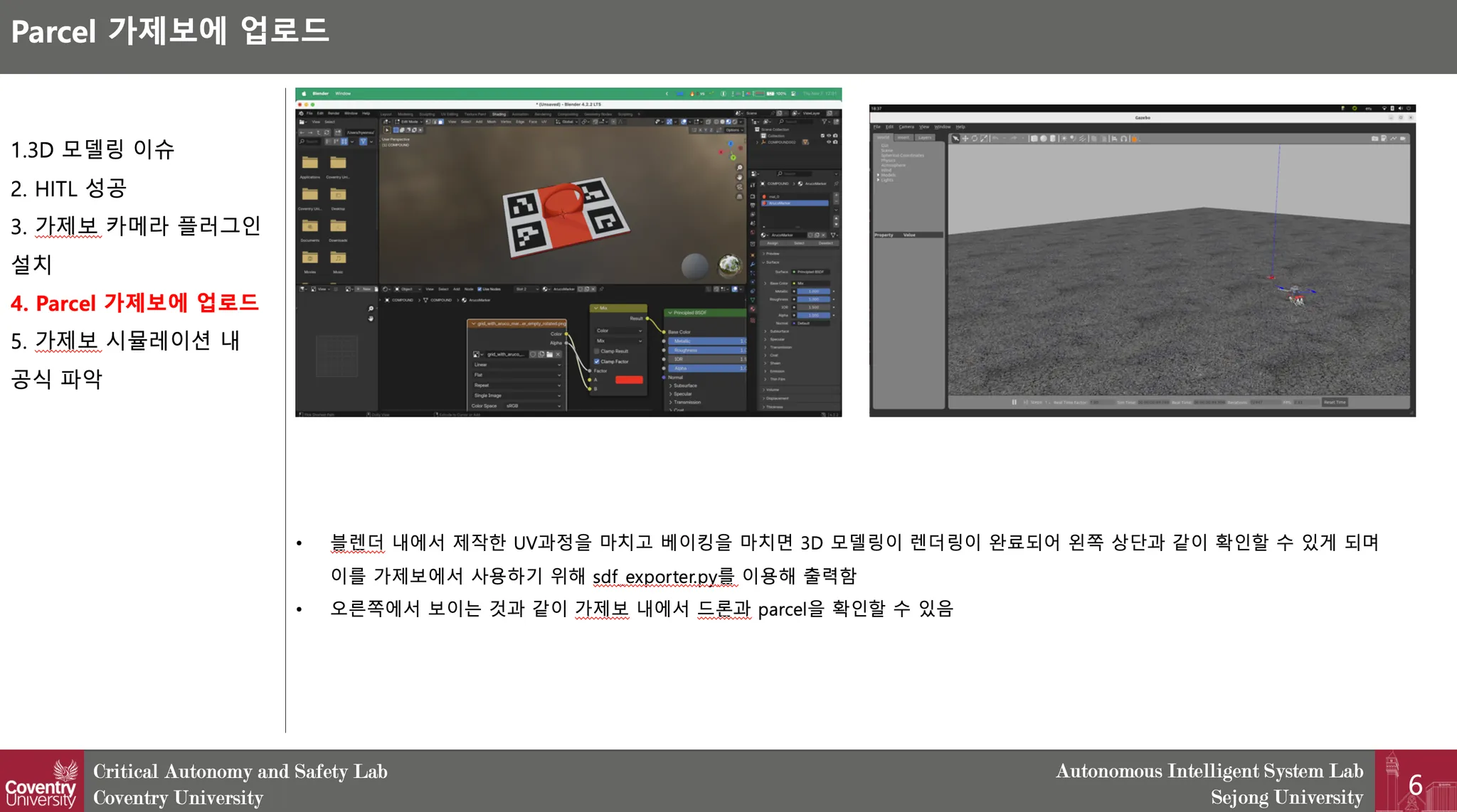
가제보에 업로드된 최종 드론 및 소포
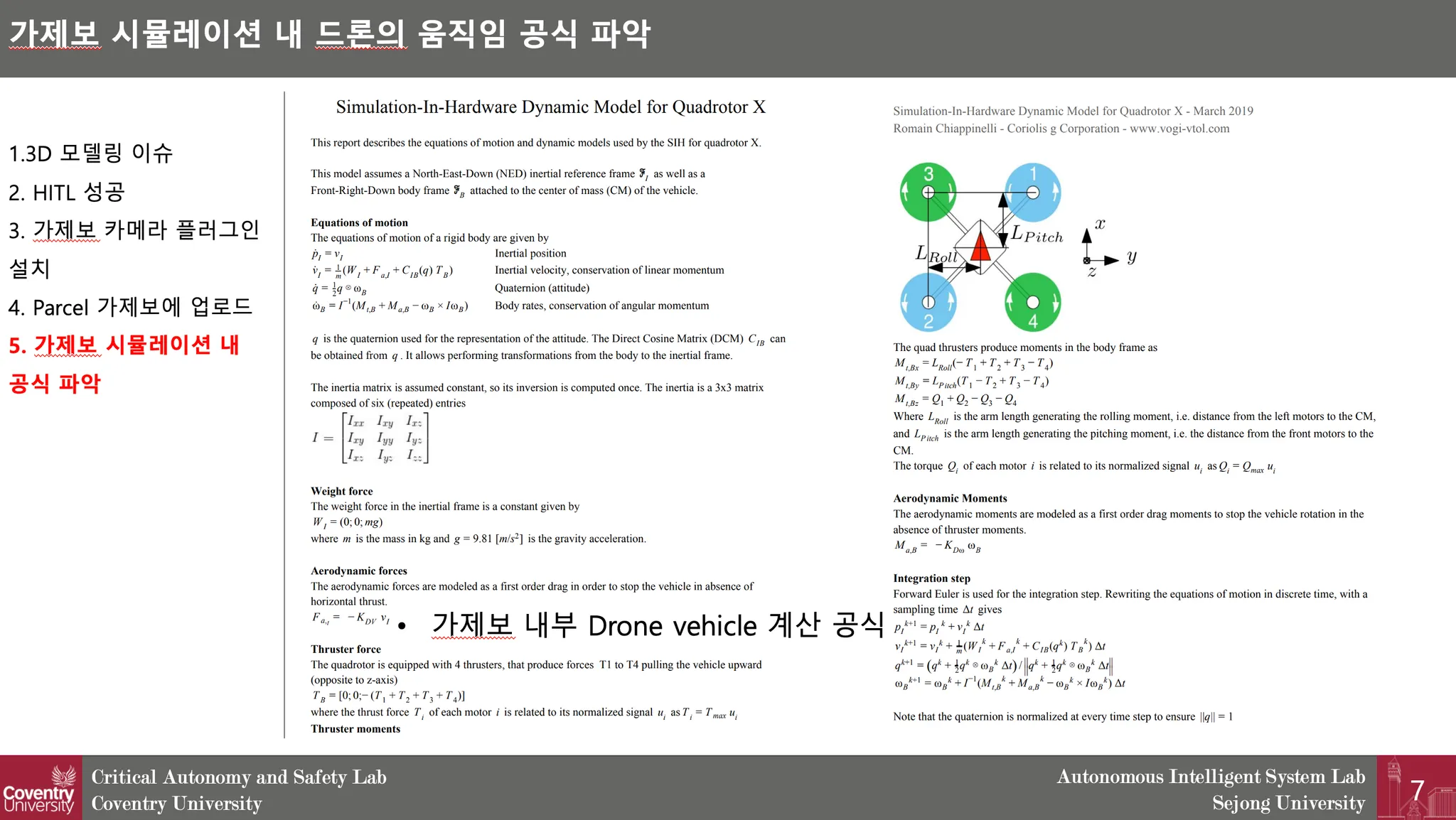
PX4에서 처리한 드론에 대한 Vehicle Dynamics에 대한 기술 문서 파악
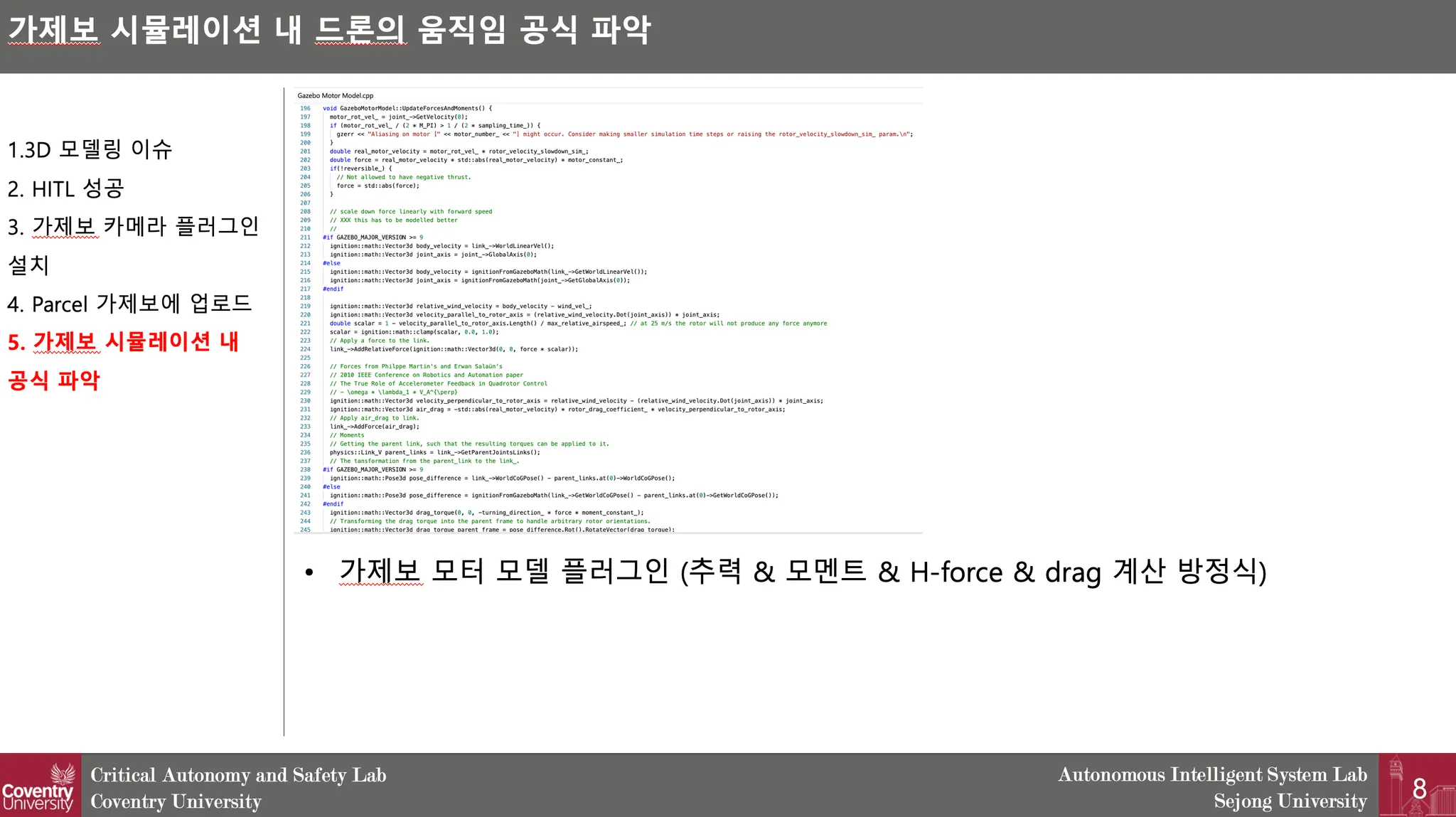
가제보 모터 모델 플러그인에서 impl 파악
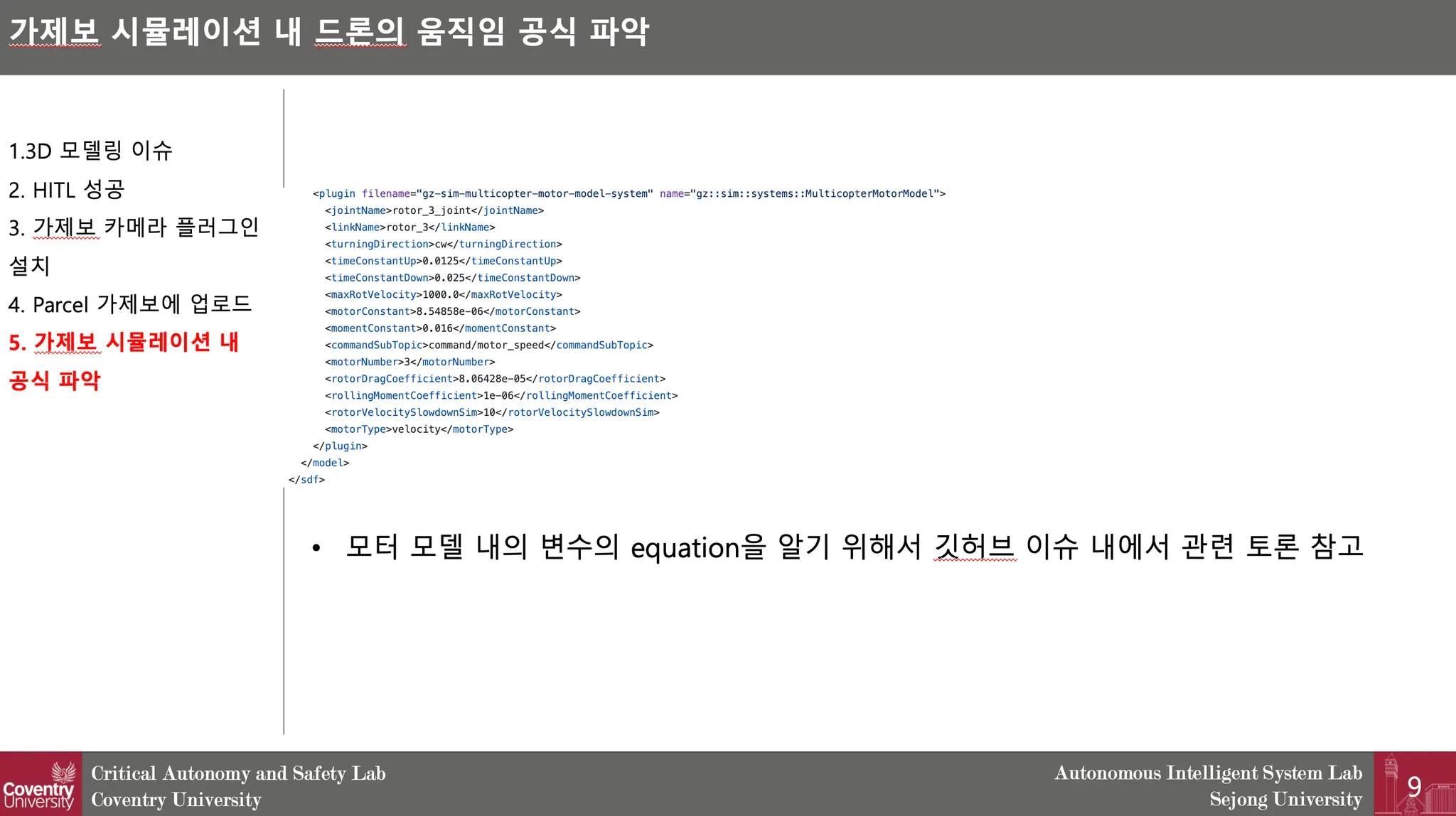
모터 모델에 대해 필요한 변수 파악
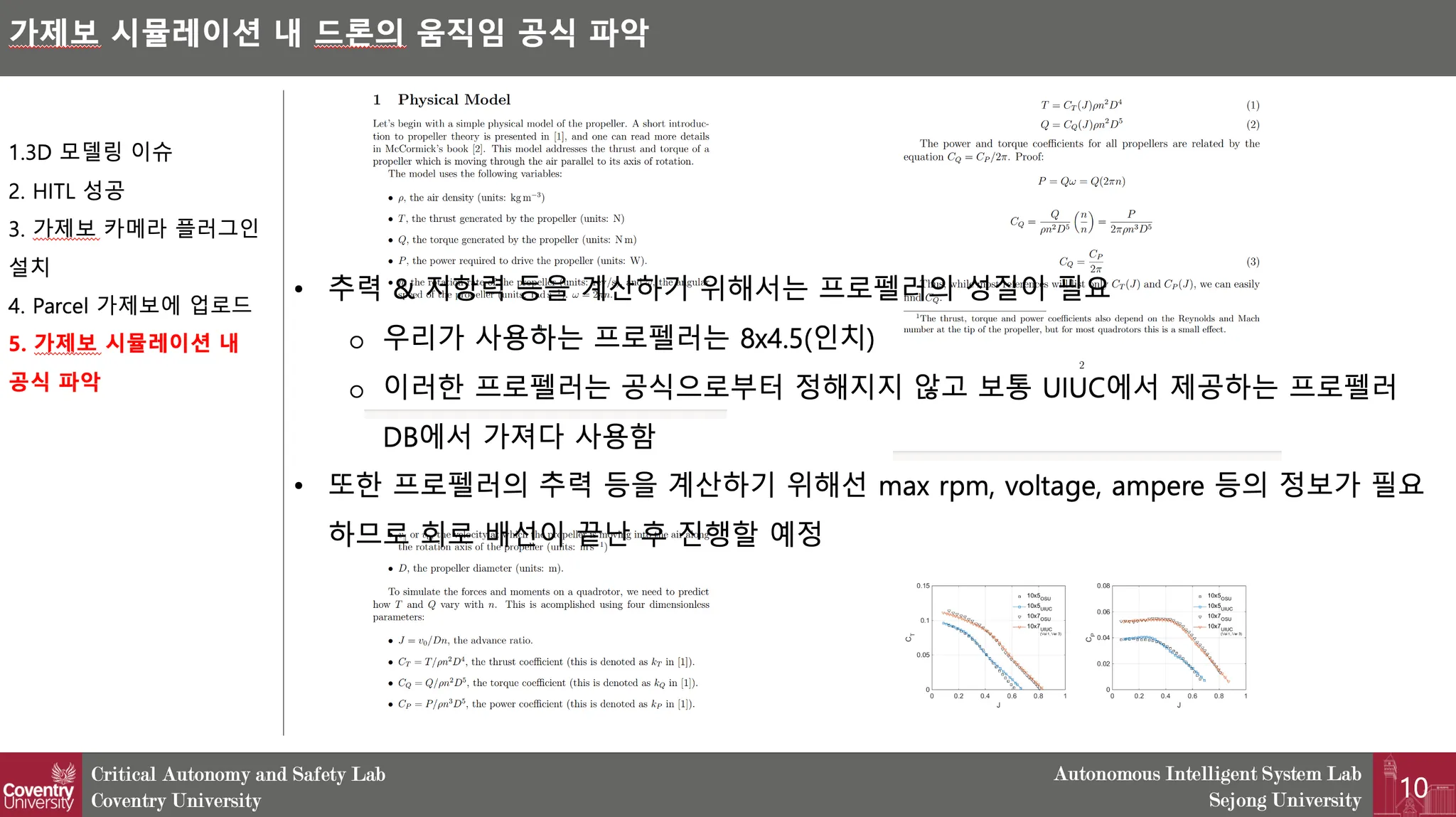
모터 모델에서 사용되는 공식 및 변수 파악
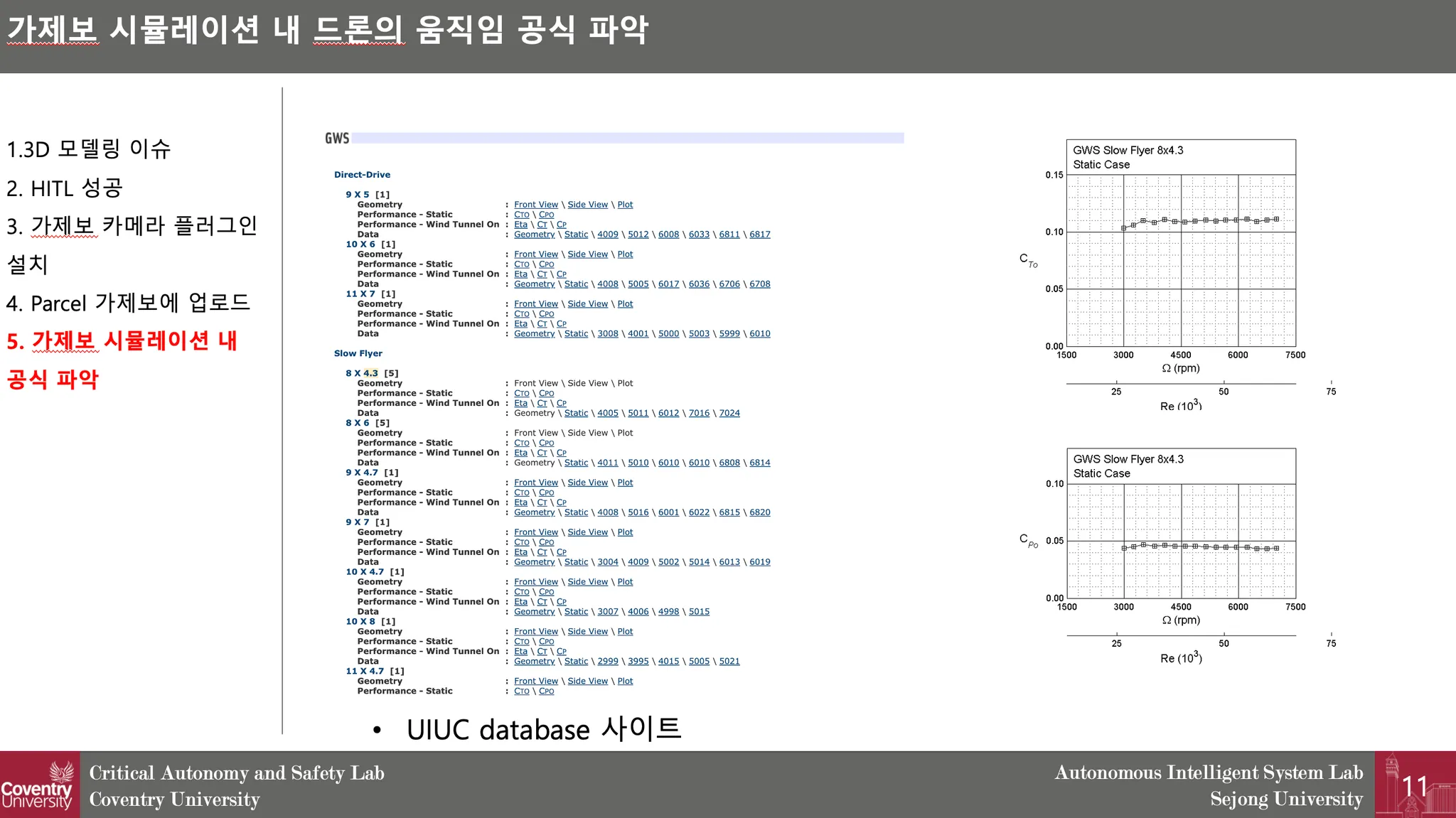
프로펠러 수치 실험 데이터가 필요하여 확인
•
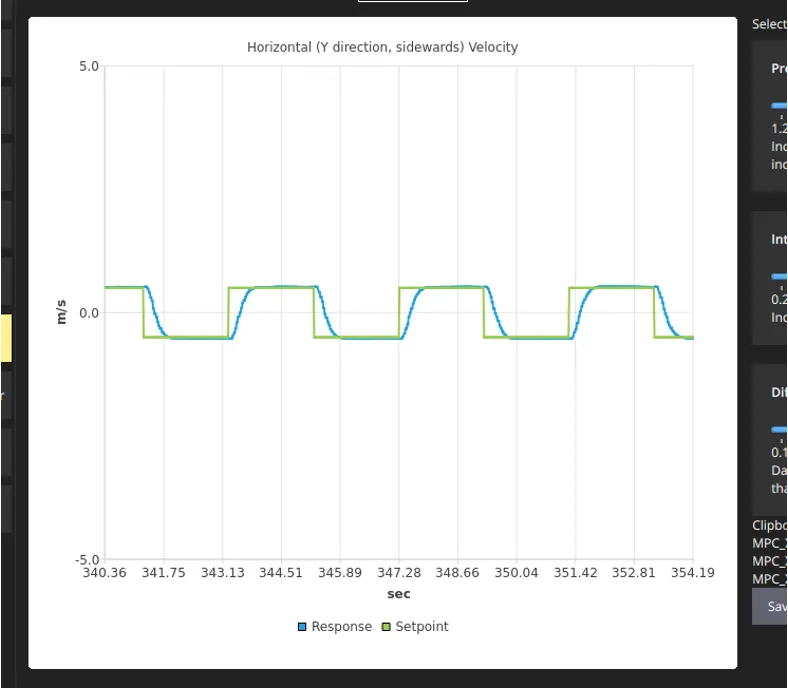
Critically damped가 될 때까지 PID 튜닝 진행
•
비례 게인을 최대한 올리게끔 하여 반응 속도가 최대한 빠르게끔 하는 방향으로 진행함

적응형 PID 튜닝을 하기 위한 각 상황별 PID 테이블 작성
•
ESC 및 모터 장착
•
젯슨 오린 전원 – ubec 납땜 -> 배터리로 전원 인가 가능
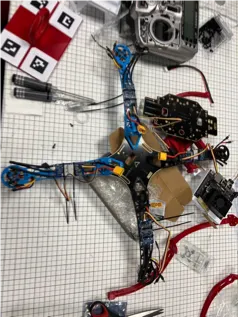
가제보 내 드론 및 실제 드론
그리퍼 동작 테스트
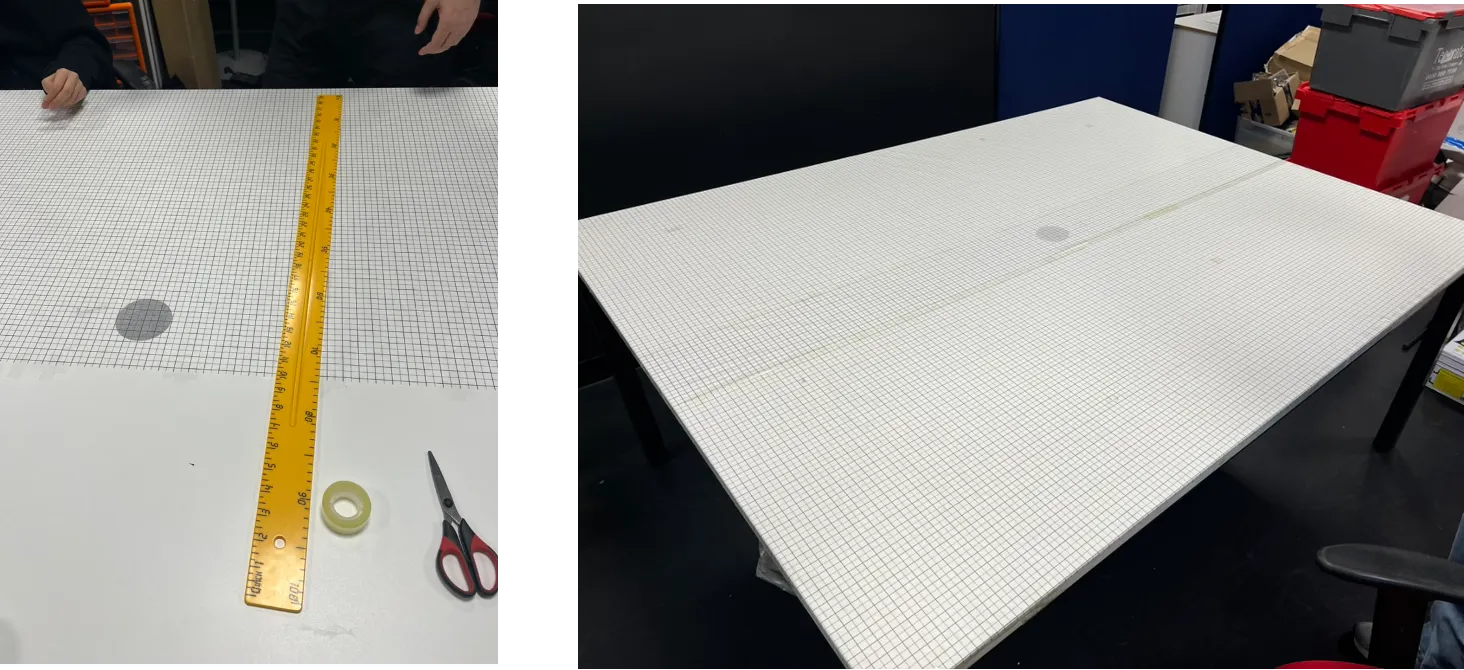
Graph Paper 설치
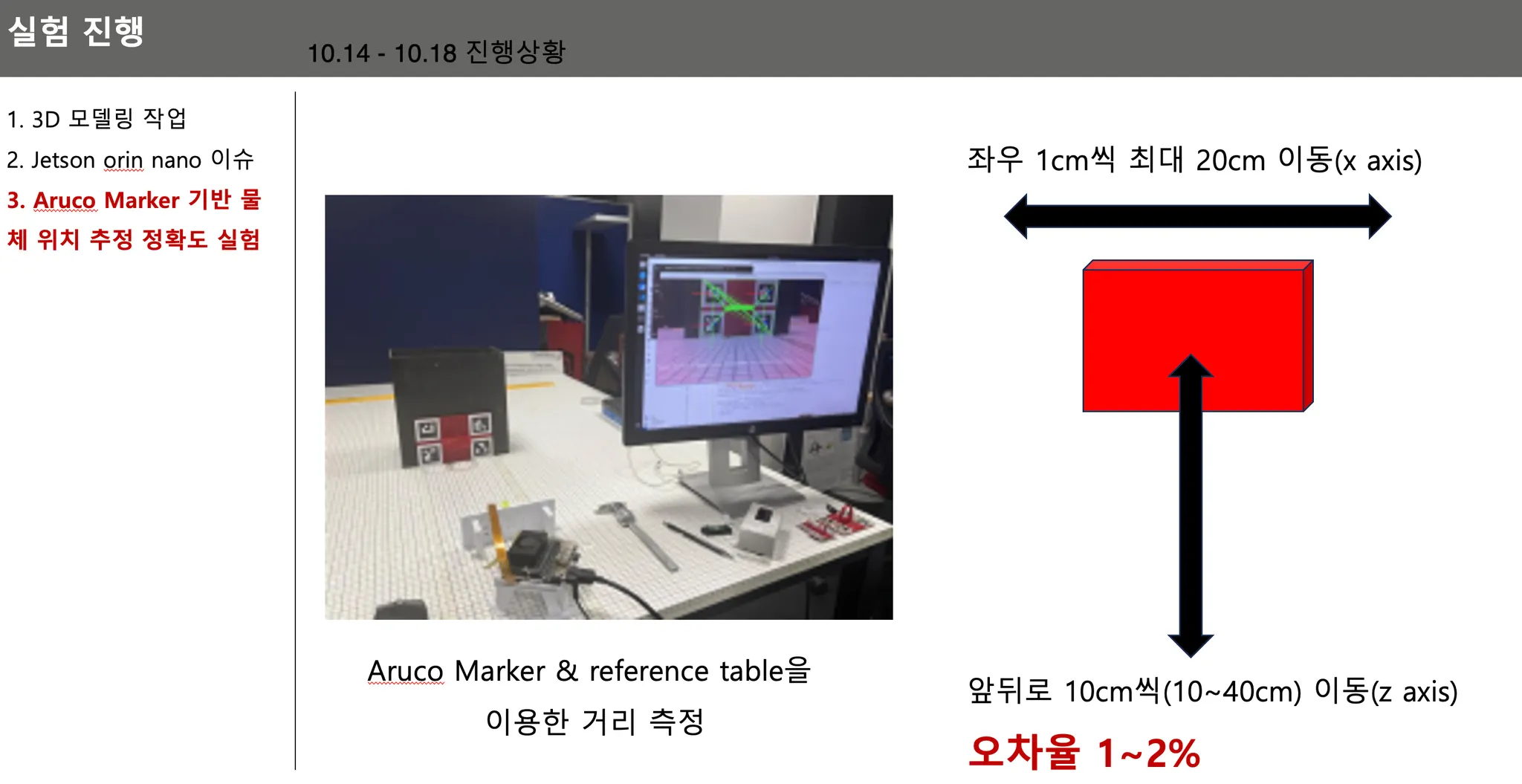
아루코 마커 기반 소포 위치 추정
시뮬레이션 내 소포 위치 탐지 코드 작성
시뮬레이션 내 센서 부착 과정
첫 HITL 컨트롤
PID 튜닝하기 전 드론 제어
SITL 드론 제어 과정
시뮬레이션 내 드론 소포 픽업
HITL 환경 내에서 PID 튜닝 과정
튜닝 이후 시범 비행